Nvidia Installation
This page explains how to install Ubuntu 22.04 and ROS 2 Humble on an Nvidia Jetson computer.
For installation instructions on a standard x86_64 or amd64 computer, see Robot Installation
Install SDK Manager
To install the OS on Nvidia Jetson computers, download Nvidia's SDK Manager
program. This program is available for Ubuntu (as a .deb package), Windows (as a .exe), and in a Docker container.
Download and install the appropriate version for your desktop from Nvidia's website.
Install JetPack 6.2 and SDKs
Follow the instructions for your Jetson computer to power it on and connect it via USB to your desktop. Open SDK Manager.
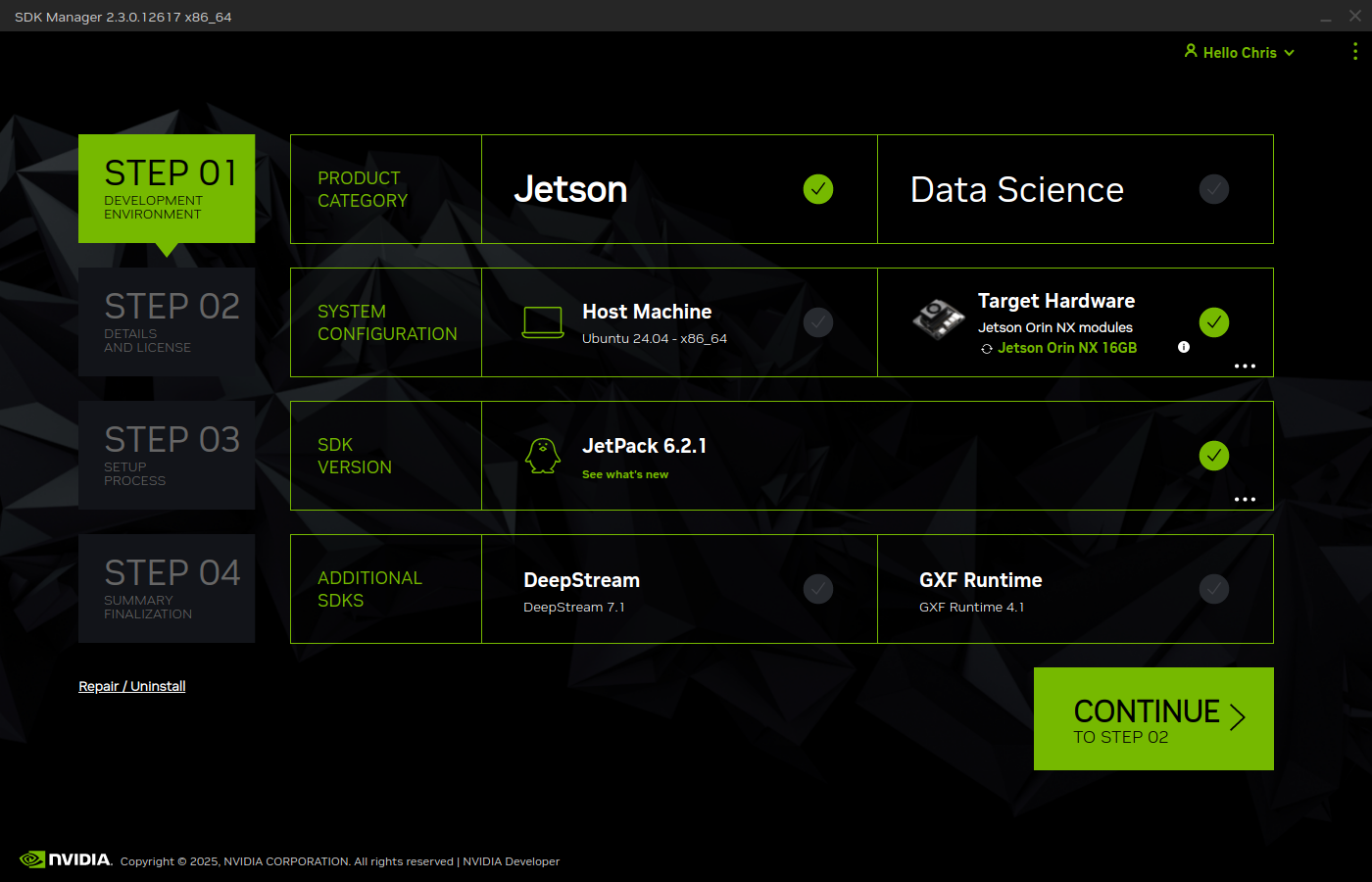
Select harget hardware
Ensure the Jetson category at the top of the window is checked and that the Target Hardware matches your model of Jetson computer. If the board is not detected, refer to the instructions provided with your Jetson computer for any additional steps that may be be needed, such as entering bootloader mode.
Select SDK version
Select SDK version 6.2.x (6.2.1 is the latest at the time of writing).
Additional SDKs
If desired, you may install additional SDKs. These are not required for ROS 2 Humble, but may be needed for specific applications you intend to run on your robot.
Start the installer
After selecting the appropriate options, click the green Continue button in the lower right of the window.
Details and license
Review the selected components. You may customize which specific components will be installed by checking or unchecking them.
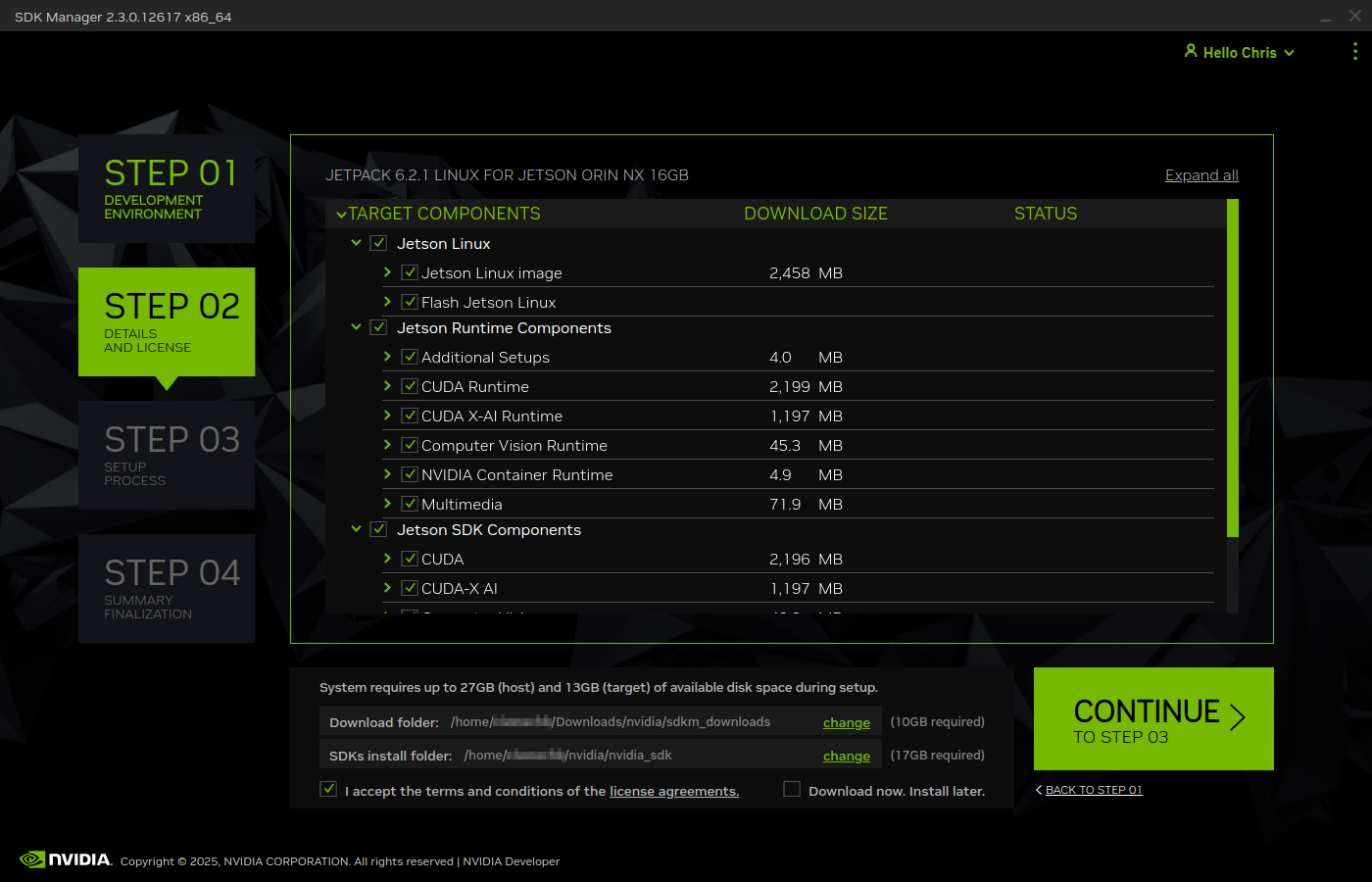
Check the license agreement at the bottom of the window and click the green Continue button.
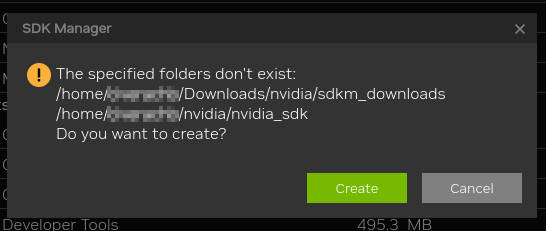
If the Download folder and SDKs instakll folder specified at the bottom of the window do not already exist on your computer you will be prompted to create them. If this happens, click the green Create button.
If you are running on Ubuntu you may be asked to enter your password to run some commands as root.
Wait for the download and installation to progress
Wait for JetPack to downloading and install. Depending on your internet connection speed this may take some time.
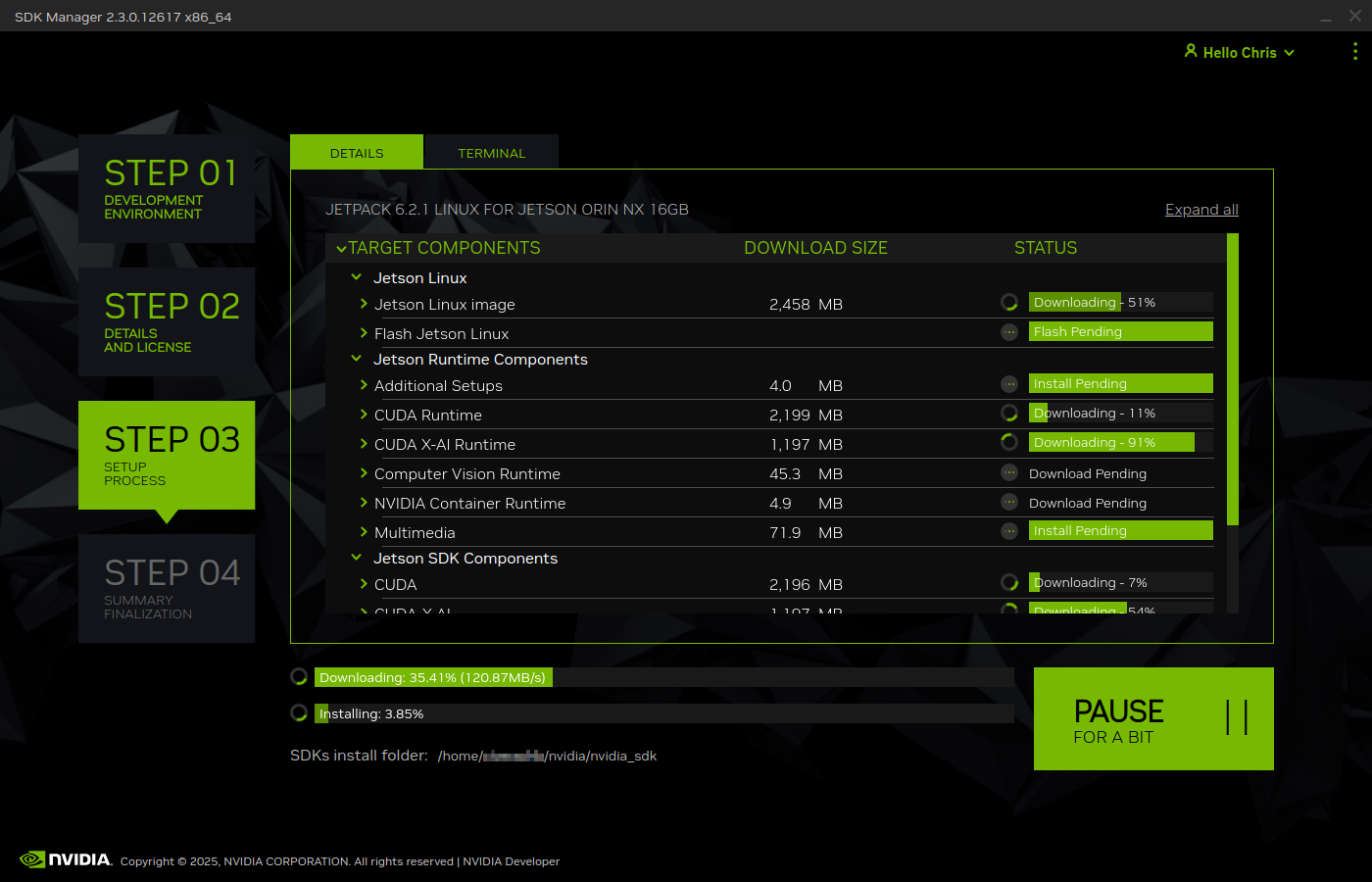
The download and installation progress is shown at the bottom of the screen. If you need to pause the process, you can press the green Pause button and resume the installation at a later time.
Flash the Jetson
Some Jetson computers skip this step. Please refer to the instructions for your specific computer.
For example, Forcecr boards use a different set of steps, documented here.
After the download has proceeded sufficiently, SDK Manager will prompt you to flash your Jetson computer.
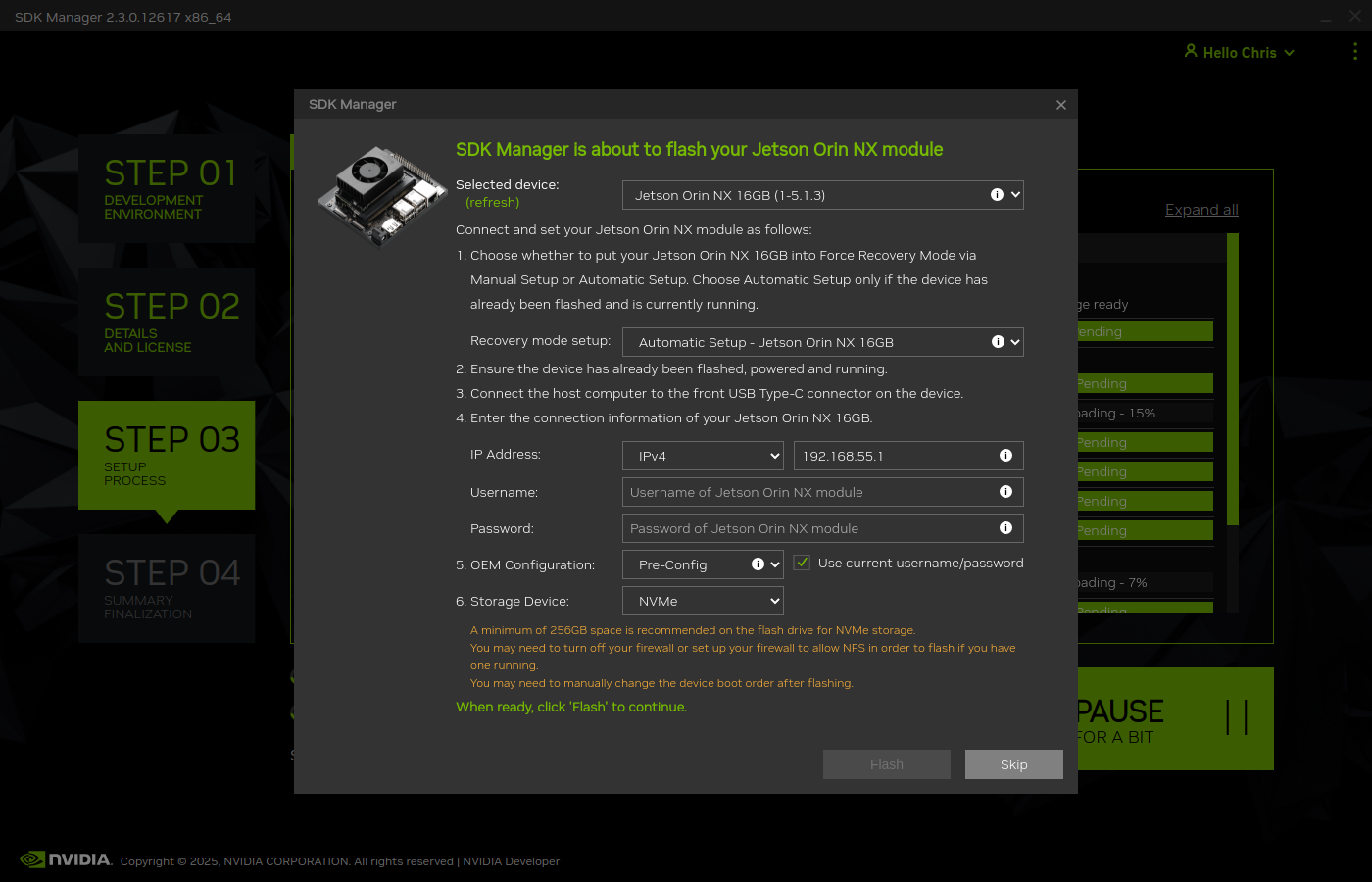
Enter the username and password you intend to use to log into the Jetson computer. By default Clearpath Robotics uses
the username administrator and the password clearpath.
When ready, click the green Flash button at the bottom of the window.
Post-installation configuration
Once the core OS and Jetson APIs are installed the next step is to install the necessary ROS components to allow the computer to control your robot.
Connect the Jetson to the internet, log in, and run the following commands to download and run Clearpath's Jetson setup script:
wget https://raw.githubusercontent.com/clearpathrobotics/clearpath_computer_installer/refs/heads/feature/humble-jetson/jetson-humble-setup.bash
bash jetson-humble-setup.bash
This script will:
- (re-)configure
aptwith addional sources; - install additional
aptandpippackages needed for Clearpath robots; - install core ROS components;
- create and build a ROS workspace (
$HOME/colcon_ws); - install additional Linux kernel modules; and
- configure your robot's initial
/etc/clearpath/robot.yamlfile.
Missing ROS dependencies
Manually running rosdep install in the generated workspace will result in warnings about some missing dependencies.
This is normal; the missing dependencies are for Clearpath platforms that are not supported on Jetson computers.
If you see warnings about the following dependencies being uninstallable, you may safely ignore them:
| Package | Notes |
|---|---|
sevcon_traction | Needed by Warthog W200, which cannot use an Nvidia Jetson as its primary computer |
ros-humble-gazebo-ros2-control | Needed for simulation support by ros2_kortex (Kinova manipulator driver). Not currently available for ARM CPUs |
Building additional kernel modules
At the time of writing, JetPack 6.1 installs the kernel 5.15.148-tegra. This kernel by default does not include the
uinput and slcan modules. Clearpath has pre-built copies
of these modules for kernel 5.15.148-tegra.
If you have a different kernel, or want to build these modules yourself, follow Nvidia's developer guide. The essential steps are summarized below, but refer to Nvidia's kernel customization guide for more details.
The following instructions assume you are building the kernel and modules directly on the Jetson. To cross-compile, refer to Nvidia's developer guide.
Install prerequisites
Run the following command:
sudo apt-get install build-essential bc flex bison libssl-dev zstd
Download and extract the kernel sources
At the time of writing, the latest kernel sources are available at https://developer.nvidia.com/embedded/jetson-linux-r3644
Run the following commands:
cd $HOME
wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v4.4/sources/public_sources.tbz2
tar xf public_sources.tbz2
cd Linux_for_Tegra/source
tar xf kernel_src.tbz2
Customize the kernel modules
To enable the slcan and uinput modules you must edit the kernel configuration file.
echo "CONFIG_CAN_SLCAN=m" >> $HOME/Linux_for_Tegra/source/kernel/kernel-jammy-src/arch/arm64/configs/defconfig
echo "CONFIG_INPUT_UINPUT=m" >> $HOME/Linux_for_Tegra/source/kernel/kernel-jammy-src/arch/arm64/configs/defconfig
Build the kernel and modules
This step can take some time. Be patient.
Run the following commands to build the kernel and modules:
cd $HOME/Linux_for_Tegra/source
mkdir kernel_out
./nvbuild.sh
Install the modules
After the build finishes, run the following commands to install the new modules:
cd $HOME/Linux_for_Tegra/source/kernel_out/kernel/kernel-jammy-src
sudo cp drivers/net/can/socat.ko /lib/modules/$(uname -r)/kernel/drivers/net/can/
sudo cp drivers/input/misc/uinput.ko /lib/modules/$(uname -r)/kernel/drivers/input/misc/
sudo depmod
sudo modprobe slcan
sudo modprobe uinput
Installing firmware updates
If you need to install firmware updates for your robot, you must install the
clearpath_firmware package on an amd64 (aka x64 or x86_64) offboard computer; the
clearpath_firmware package is not available for ARM processors as a debian package.
Connect the robot's MCU directly to the offboard computer (using either ethernet or USB, as appropriate for your model of robot) and run
ros2 run clearpath_firmware flash
on the offboard computer to update the firmware.